Nema 24 (60mm) stepper motor

>> Nā wehewehe pōkole
| ʻAno kaʻa | stepper bipolar |
| Angle ʻanuʻu | 1.8° |
| Voltage (V) | 2.1 / 2.9 / 3.2 / 3.7 / 4.1 |
| I kēia manawa (A) | 5 |
| Kū'ē (Ohms) | 0.42 / 0.57 / 0.64 / 0.74 / 0.81 |
| Ka hoʻokuʻu ʻana (mH) | 1.3 / 1.98 / 2.3 / 2.83 / 3.23 |
| Uea Lead | 4 |
| Paʻa ʻana i ka Torque (Nm) | 1.5 / 2.5 / 3 / 3.5 / 4 |
| Ka lōʻihi (mm) | 55 / 75 / 84 / 100 / 112 |
| Ka Mahana Kūlohelohe | -20 ℃ ~ +50 ℃ |
| Piʻi wela | 80K Max. |
| Ka ikaika dielectric | 1mA Max.@ 500V, 1KHz, 1Sec. |
| Kū'ē Kū'ē | 100MΩ Min.@500Vdc |
Nui
20mm, 28mm, 35mm, 42mm, 57mm, 60mm, 86mm
Stepper Angle
1.8°, 0.9°
Poihana
ʻO ka torque kiʻekiʻe a hiki i 6N.m, piʻi haʻahaʻa haʻahaʻa, haʻahaʻa haʻahaʻa haʻahaʻa, haʻahaʻa haʻahaʻa, lōʻihi ke ola (a hiki i 5 miliona mau pōʻai).
Application
Lapaʻau diagnostic diagnostics, life science instruments, robots, laser equipment, analytical instruments, semiconductor equipment, electronic production equipment, non-standard automation machines a me nā ʻano mea hana automation.
>> Nā palapala hōʻoia

>> Nā ʻāpana uila
| Nui kaʻa | Voltage/ Māhele (V) | i kēia manawa/ Māhele (A) | Kū'ē/ Māhele (Ω) | Inductance/ Māhele (mH) | Helu o Uea Lead | Rotor Inertia (g.cm2) | Paʻa Torque (Nm) | Loihi kaʻa L (mm) |
| 60 | 2.1 | 5 | 0.42 | 1.3 | 4 | 340 | 1.5 | 55 |
| 60 | 2.9 | 5 | 0.57 | 1.98 | 4 | 590 | 2.5 | 75 |
| 60 | 3.2 | 5 | 0.64 | 2.3 | 4 | 690 | 3 | 84 |
| 60 | 3.7 | 5 | 0.74 | 2.83 | 4 | 850 | 3.5 | 100 |
| 60 | 4.1 | 5 | 0.81 | 3.23 | 4 | 960 | 4 | 112 |
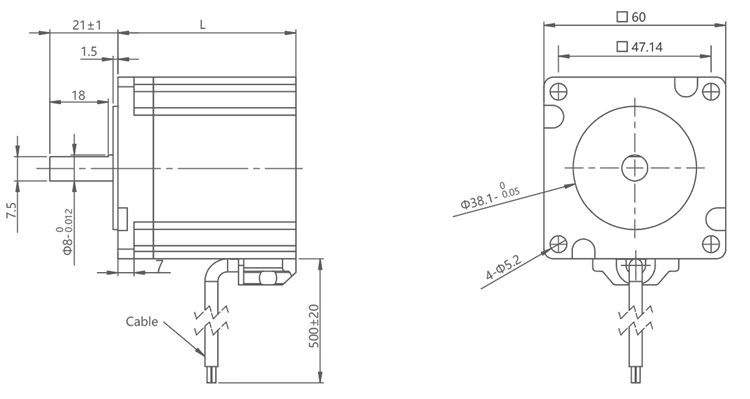
>> Nā palena ʻenehana maʻamau
| Hoʻomaʻemaʻe Radial | 0.02mm Max (450g ukana) | ʻO ke kūʻokoʻa | 100MΩ @500VDC |
| Axial clearance | 0.08mm Max (450g ukana) | Ka ikaika dielectric | 500VAC, 1mA, 1s@1KHZ |
| Kaumaha radial kiʻekiʻe | 70N (20mm mai ka ʻili flange) | Papa hoʻopulapula | Papa B (80K) |
| Kaumaha axial kiʻekiʻe | 15N | Ka wela ambient | -20 ℃ ~ +50 ℃ |
>> 60HS2XX-X-4A kiʻi kiʻi ʻoniʻoni
>> Kipi-frequency curve
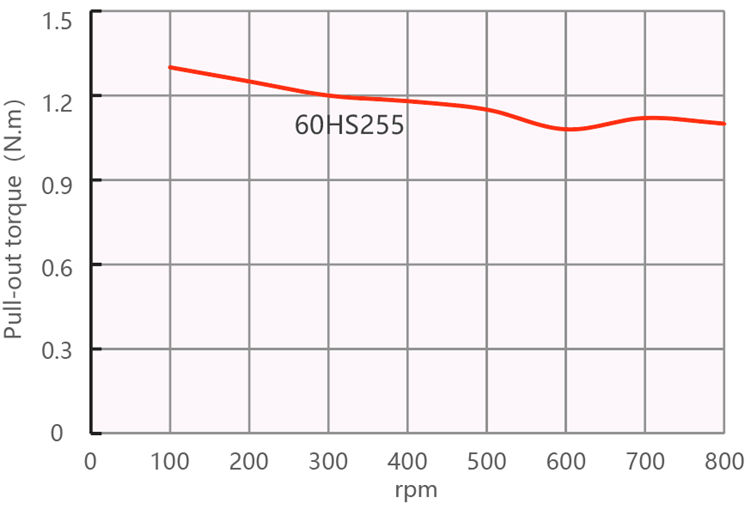
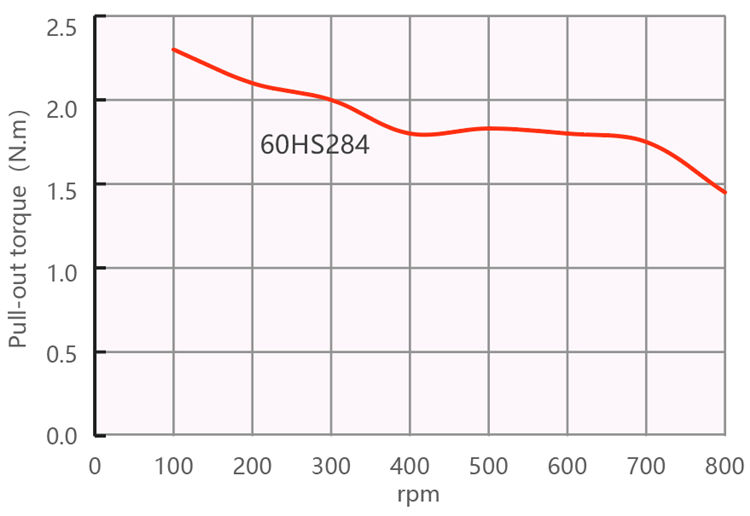
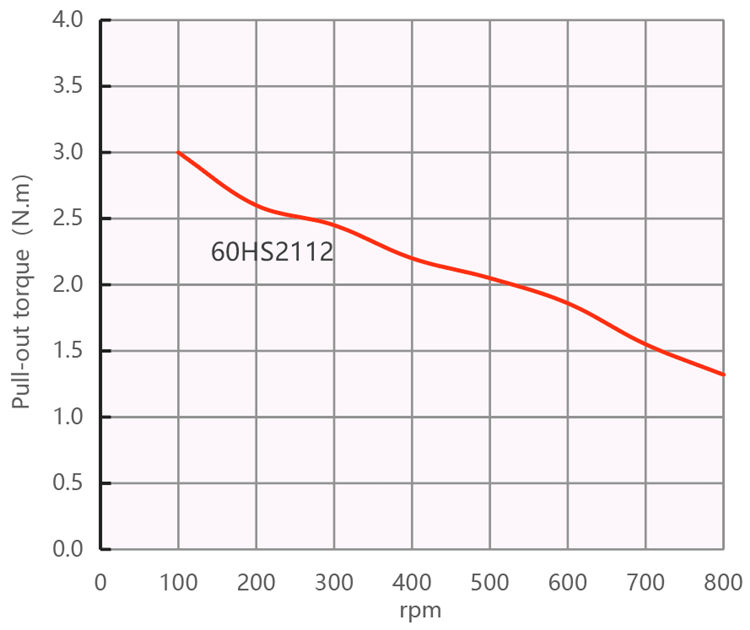
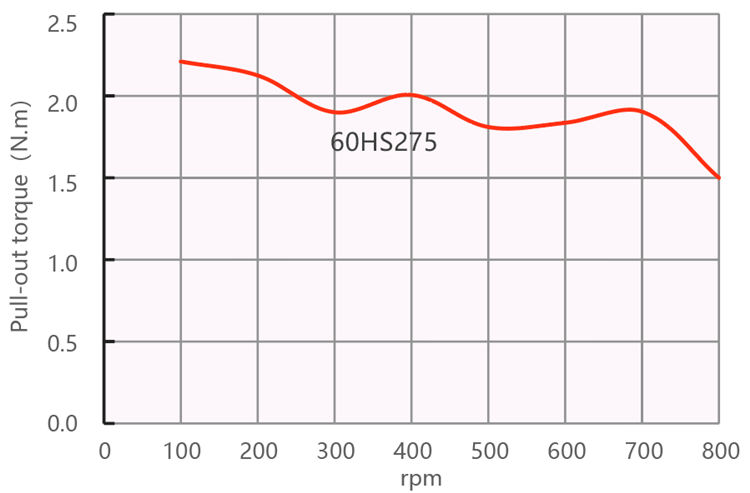
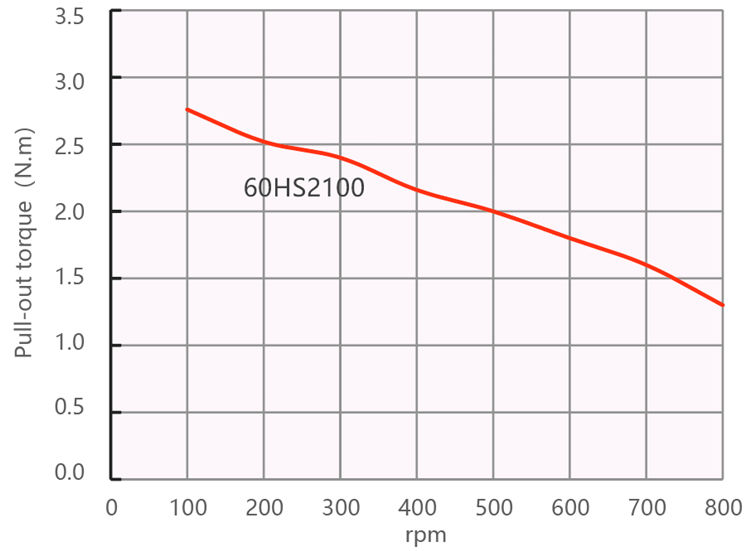
Kūlana hoʻāʻo:
ʻO ka hoʻokele chopper, ka hapalua micro-stepping, ka uila uila 40V