Nema 23 (57mm) pani pani ʻia nā kaʻa stepper

>> Nā wehewehe pōkole
| ʻAno kaʻa | stepper bipolar |
| Angle ʻanuʻu | 1.8° |
| Voltage (V) | 2.6 / 3.6 / 4.1 |
| I kēia manawa (A) | 3 / 4 / 5 |
| Kū'ē (Ohms) | 0.86 / 0.9 / 0.81 |
| Ka hoʻokuʻu ʻana (mH) | 2.6 / 4.5 / 4.6 |
| Uea Lead | 4 |
| Paʻa ʻana i ka Torque (Nm) | 1 / 1.8 / 3 |
| Ka lōʻihi (mm) | 55 / 75 / 112 |
| Encoder | 1000CPR |
| Ka Mahana Kūlohelohe | -20 ℃ ~ +50 ℃ |
| Piʻi wela | 80K Max. |
| Ka ikaika dielectric | 1mA Max.@ 500V, 1KHz, 1Sec. |
| Kū'ē Kū'ē | 100MΩ Min.@500Vdc |
>> Nā wehewehe
Poihana
Hiki ke hoʻouka nui, piʻi haʻahaʻa haʻahaʻa, haʻalulu liʻiliʻi, haʻahaʻa haʻahaʻa, wikiwiki wikiwiki, pane wikiwiki, hana maʻalahi, ola lōʻihi, pololei kūlana kiʻekiʻe (a hiki i ± 0.005mm)
Application
ʻO nā mea hana diagnostic lāʻau lapaʻau, nā mea hana ʻepekema ola, nā robots, nā mea laser, nā mea analytical, nā lako semiconductor, nā lako hana uila, nā lako automation non-standard a me nā ʻano mea hana automation.
>> Nā palapala hōʻoia

>> Nā ʻāpana uila
| Nui kaʻa | Voltage/ Māhele (V) | i kēia manawa/ Māhele (A) | Kū'ē/ Māhele (Ω) | Inductance/ Māhele (mH) | Helu o Uea Lead | Rotor Inertia (g.cm2) | Paʻa Torque (Nm) | Loihi kaʻa L (mm) |
| 57 | 2.6 | 3 | 0.86 | 2.6 | 4 | 300 | 1 | 55 |
| 57 | 3.6 | 4 | 0.9 | 4.5 | 4 | 480 | 1.8 | 75 |
| 57 | 4.1 | 5 | 0.81 | 4.6 | 4 | 800 | 3 | 112 |
>> Nā palena ʻenehana maʻamau
| Hoʻomaʻemaʻe Radial | 0.02mm Max (450g ukana) | ʻO ke kūʻokoʻa | 100MΩ @500VDC |
| Axial clearance | 0.08mm Max (450g ukana) | Ka ikaika dielectric | 500VAC, 1mA, 1s@1KHZ |
| Kaumaha radial kiʻekiʻe | 70N (20mm mai ka ʻili flange) | Papa hoʻopulapula | Papa B (80K) |
| Kaumaha axial kiʻekiʻe | 15N | Ka wela ambient | -20 ℃ ~ +50 ℃ |
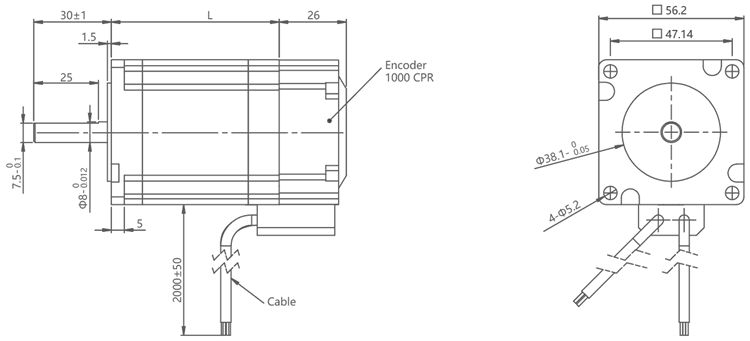
>> 57IHS2XX-X-4A kiʻi kiʻi ʻoniʻoni
| Hoʻonohonoho pine (ʻokoʻa) | ||
| Pin | wehewehe | kala kala |
| 1 | +5V | ʻulaʻula |
| 2 | GND | Keʻokeʻo |
| 3 | A+ | ʻeleʻele |
| 4 | A- | Polū |
| 5 | B+ | Melemele |
| 6 | B- | ʻōmaʻomaʻo |





